ตรวจและต่อระบบมอเตอร์
คอร์สเรือไฟฟ้า · วัน 2 บ่าย (1) · คอนโทรลเลอร์ · มอเตอร์ · คันเร่ง · เบรกเกอร์
นิยาม · หน้าที่ · ความสำคัญ
นิยามระบบขับเคลื่อน = คอนโทรลเลอร์ + มอเตอร์ + คันเร่ง + อุปกรณ์ป้องกัน (เบรกเกอร์/สวิตช์)
หน้าที่เปลี่ยนพลังงานไฟฟ้าจากแบตให้เป็นการหมุนใบพัดตามที่คันเร่งสั่ง
ความสำคัญเป็นส่วนที่ทำให้เรือเคลื่อนที่ — ต่อถูกและปลอดภัยจึงใช้งานได้จริง ไม่อันตราย
1 ส่วนประกอบของระบบขับเคลื่อน
| ส่วนประกอบ | หน้าที่ / สายที่เกี่ยวข้อง |
|---|---|
| คอนโทรลเลอร์ | กล่องคุมมอเตอร์ (เช่น Fardriver) — รับไฟ B+/B− จ่ายเฟส U/V/W |
| มอเตอร์ BLDC/PMSM | สายเฟส U/V/W (เส้นใหญ่ 3) + สาย hall sensor (เส้นเล็ก ~5) |
| คันเร่ง (Hall) | 3 สาย: +5V, สัญญาณ (~0.8–4.2V วัดจริง), GND |
| สวิตช์กุญแจ / contactor | สั่งเปิด-ปิดระบบ / ตัดไฟหลัก |
| เบรกเกอร์ / ฟิวส์ | ตัดไฟเมื่อกระแสเกิน ป้องกันสาย/อุปกรณ์ |
| Precharge | ลดประกายไฟตอนสับไฟเข้าคอนโทรลเลอร์ |
2 แผนผังการเดินไฟ
แบต → เบรกเกอร์/ฟิวส์ → สวิตช์หลัก → คอนโทรลเลอร์ → เฟส U/V/W → มอเตอร์ ; คันเร่ง+กุญแจ เข้าพอร์ตสัญญาณ
3 ขนาดเบรกเกอร์/ฟิวส์
ขนาด ≈ กระแสต่อเนื่อง × 1.25–1.5
เช่น ระบบดึงต่อเนื่อง 80A → เลือกเบรกเกอร์ ~100–120A
4 เฟส & Hall หมุนผิด
ถ้ามอเตอร์หมุนผิดทาง/กระตุก → สลับคู่สายเฟส หรือจับคู่ hall–phase ใหม่ (มัก auto-learn ในแอปได้)
⚠ ความปลอดภัยสำคัญมาก
ต่อสายตอน "เบรกเกอร์ปิด" เสมอ · ห้ามต่อ/ถอดขณะมีไฟหรือมีโหลด · ใบพัดหมุน = อันตราย ต้อง ยกเรือพ้นน้ำหรือถอดใบพัด ก่อนทดสอบบนบก ·
ตรวจขั้ว +/− ก่อนจ่ายไฟ · ใช้ precharge กันสปาร์กตอนสับไฟ
ระบบขับเคลื่อนเรือไฟฟ้าทำงานอย่างไร
มอเตอร์ · คอนโทรลเลอร์ · คันเร่ง ทำงานร่วมกัน
5 มอเตอร์ BLDC/PMSM ทำงานอย่างไร
BLDC/PMSM คือมอเตอร์ไฟฟ้า ไร้แปรงถ่าน ทำงานด้วยไฟ 3 เฟส (U/V/W) คอนโทรลเลอร์จะสลับไฟเข้าทั้งสามเฟสสลับกันอย่างรวดเร็ว ทำให้สนามแม่เหล็กหมุน และดึงให้โรเตอร์ (กับใบพัด) หมุนตาม
- แรงบิดต้นดี ออกตัวมีกำลังตั้งแต่รอบต่ำ เหมาะกับการดันเรือ
- เงียบ + บำรุงรักษาน้อย ไม่มีแปรงถ่านสึกหรอ
- รอบ/แรงบิด เป็นตัวกำหนดความเร็วเรือผ่านใบพัด
6 คันเร่งและคอนโทรลเลอร์คุยกันอย่างไร
- คันเร่ง (hall) ส่ง "แรงดันสัญญาณ" บอกว่าจะเอากำลังแค่ไหน — ตอนปล่อยประมาณ 0.8V ตอนเต็มประมาณ 4.2V (ค่าจริงต้องวัด)
- คอนโทรลเลอร์ รับสัญญาณ แล้วจ่ายกระแสเข้ามอเตอร์มากขึ้นตามที่สั่ง → เรือเร็วขึ้น
- hall sensor ในมอเตอร์ คอยบอกตำแหน่งโรเตอร์ ให้คอนโทรลเลอร์สลับเฟสถูกจังหวะ มอเตอร์จึงหมุนเรียบ
เมื่อสายไม่เข้าคู่ ถ้าลำดับเฟส U/V/W หรือสาย hall ไม่ตรงกัน มอเตอร์จะ กระตุก/หมุนผิดทาง/ไม่ออกตัว —
แก้ได้ด้วยการสลับคู่เฟส หรือใช้ฟังก์ชัน auto-learn ในแอปจับคู่ hall–phase ใหม่
เครื่องทดสอบระบบมอเตอร์ (ebike testing device)
ตรวจมอเตอร์ · เซนเซอร์เฟส (hall) · กล่องควบคุม · คันเร่ง · สถานะแบต
7 ใช้เครื่องทดสอบหาจุดเสียได้เร็ว
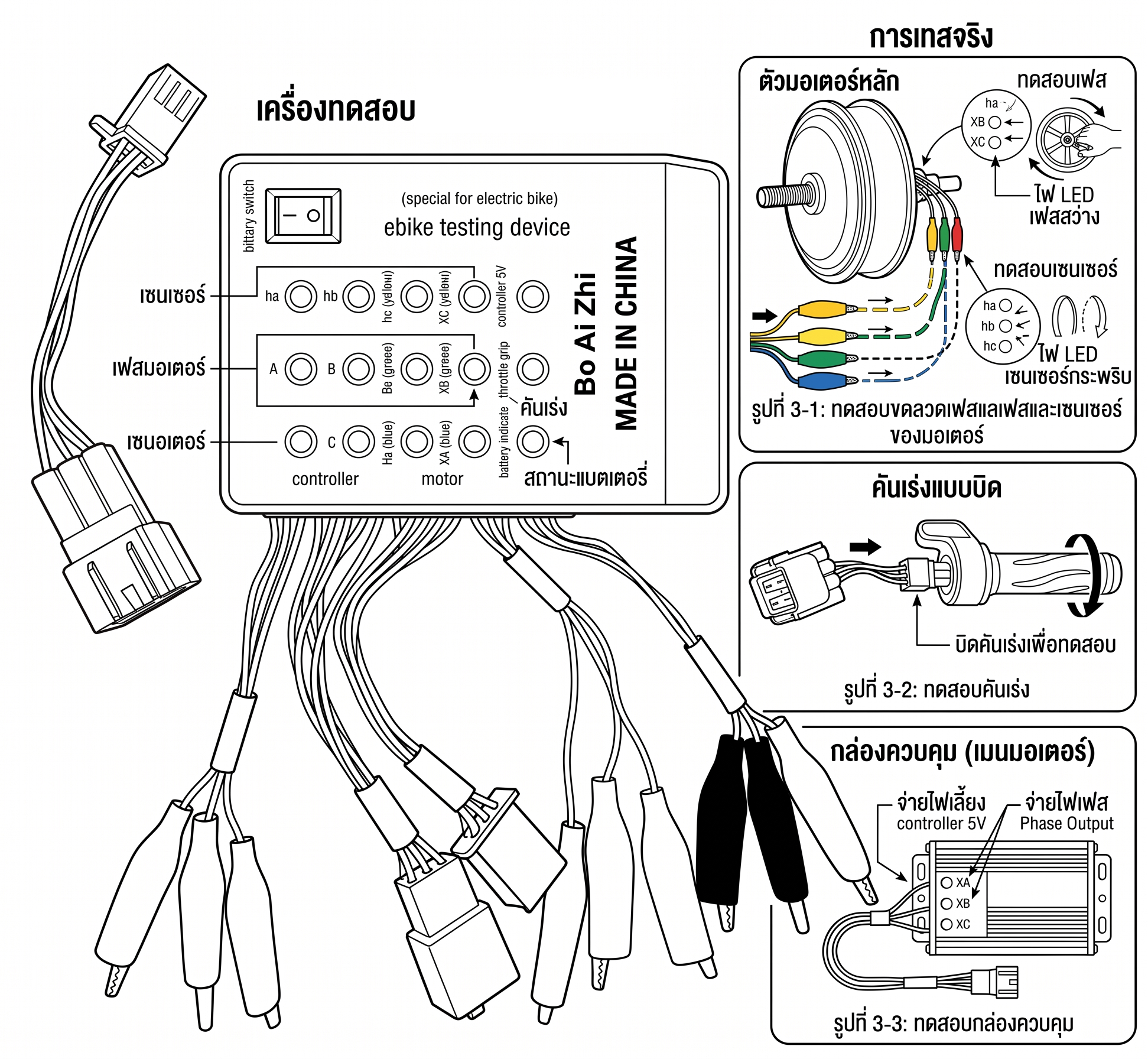
เครื่องทดสอบรวม — เสียบสายเข้ากับมอเตอร์/กล่องควบคุม/คันเร่ง แล้วดูผลผ่านไฟ LED และจอ
- ทดสอบมอเตอร์ ดูเฟส (U/V/W) และเซนเซอร์ hall ว่าครบ/ปกติไหม (ดูจากไฟ LED ไล่จังหวะ)
- ทดสอบกล่องควบคุม จ่ายไฟเลี้ยง 5V และดูสัญญาณเฟสออก (Phase Output)
- ทดสอบคันเร่ง บิดคันเร่งแล้วดูค่าสัญญาณว่าไล่ขึ้น-ลงปกติ
- ดูสถานะแบต ตรวจแรงดันเบื้องต้น
ช่วยได้มาก เวลาเจอมอเตอร์กระตุก/ไม่ออกตัว ใช้เครื่องนี้แยกได้ว่าปัญหาอยู่ที่ มอเตอร์ เซนเซอร์ กล่องควบคุม หรือคันเร่ง โดยไม่ต้องเดา
อ่านป้ายสเปกมอเตอร์ (Nameplate)
ป้ายข้างมอเตอร์บอกพิกัดสำคัญ — ใช้เลือกสาย เบรกเกอร์ และตั้งค่าคอนโทรลเลอร์
8 ตัวอย่างป้ายมอเตอร์จริง

ป้ายมอเตอร์ขับเคลื่อน — Zhejiang Founder Motor · รุ่น TZ160X030
| รายการ | ค่า |
|---|---|
| รุ่นมอเตอร์ | TZ160X030 |
| จำนวนเฟส | 3 เฟส |
| แรงดันพิกัด | 115 V |
| กำลังต่อเนื่อง | 15 kW |
| กำลังสูงสุด (Peak) | 30 kW |
| แรงบิดต่อเนื่อง | 30 N·m |
| แรงบิดสูงสุด (Peak) | 110 N·m |
| รอบสูงสุด | 7,600 rpm |
| ระบายความร้อน | อากาศตามธรรมชาติ |
| ระดับป้องกัน | IP67 |
| ระดับฉนวน | Class H |
| ลักษณะงาน (Duty) | S9 |
- กำลังต่อเนื่อง vs สูงสุด 15 kW คือใช้ได้ยาว ๆ · 30 kW คือเร่งสั้น ๆ ชั่วครู่ — คิดสาย/เบรกเกอร์/แบตจาก "ค่าต่อเนื่อง" เป็นหลัก
- 3 เฟส 115 V คือไฟ AC ที่คอนโทรลเลอร์ปั่นออกขา U/V/W — ไม่ใช่แรงดันแบต (DC) ที่ต่อเข้า B+/B−
- IP67 กันฝุ่น + จุ่มน้ำตื้นชั่วคราวได้ — เหมาะกับเรือ แต่ยังต้องกันน้ำจุดต่อสายเอง
- Class H ฉนวนทนความร้อนสูง (~180°C) · S9 งานโหลดแปรผันไม่สม่ำเสมอ (เร่ง-ผ่อนตามคลื่น/ลม)
เชื่อมโยงการคำนวณ (บท 2) มอเตอร์ 15 kW ต่อเนื่องบนแพ็ก 76.8 V → กระแสราว 15,000 ÷ 76.8 ≈ 195 A — ต้องใช้สายใหญ่ + เบรกเกอร์/BMS พิกัดสูงตาม
กล่องคอนโทรลเลอร์ (Controller)
สมองของระบบขับเคลื่อน — รับไฟ DC จากแบต ปั่นเป็น 3 เฟสจ่ายมอเตอร์ และอ่านป้ายพิกัด
9 รู้จักกล่องคอนโทรลเลอร์ Fardriver

กล่องคอนโทรลเลอร์ + ชุดสาย (B+/B− กำลัง · U/V/W เฟส · สายสัญญาณ) และฝาครอบ
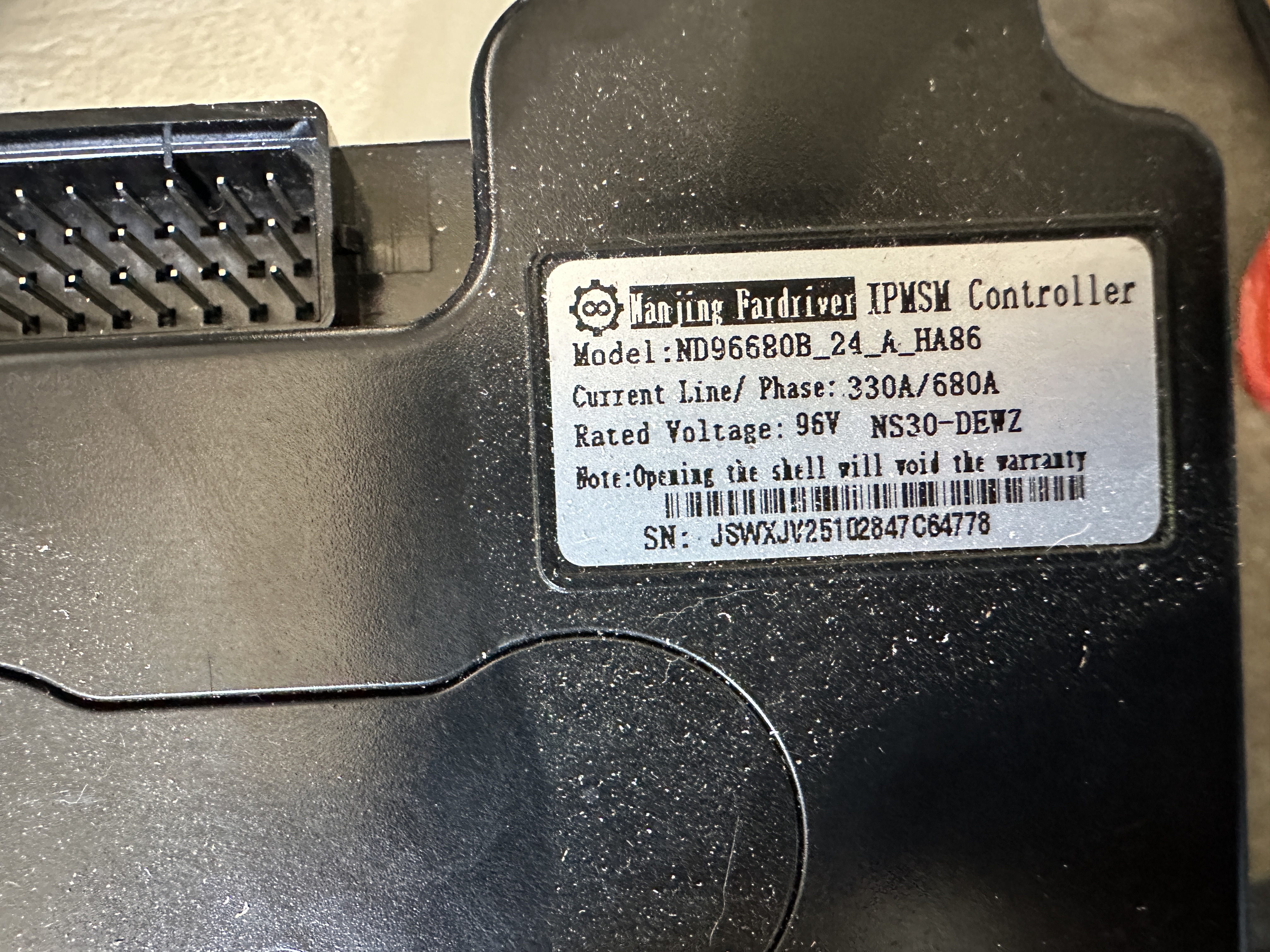
ป้ายสเปกข้างกล่อง — Nanjing Fardriver
| รายการ | ค่า |
|---|---|
| ผู้ผลิต | Nanjing Fardriver |
| ชนิด | IPMSM Controller (คุมมอเตอร์แม่เหล็กถาวร) |
| รุ่น | ND96680B_24_A_HA86 |
| กระแส Line / Phase | 330 A / 680 A |
| แรงดันพิกัด | 96 V |
- กระแส Line vs Phase Line 330A = กระแสฝั่งแบต (DC) · Phase 680A = กระแสฝั่งมอเตอร์ (เฟส) ที่สูงกว่าตอนเร่ง
- แรงดันพิกัด 96 V ใช้กับระบบไม่เกิน 96V — แพ็กเรือจริง 24S LiFePO₄ (76.8V nominal · ชาร์จเต็ม 87.6V) อยู่ในพิกัดพอดี
- IPMSM คุมมอเตอร์ซิงโครนัสแม่เหล็กถาวรฝังภายใน (กลุ่มเดียวกับ BLDC/PMSM ในหัวข้อ 5) — ต่อ B+/B− เข้าไฟแบต, U/V/W ออกมอเตอร์, ชุดสายเล็กคือสัญญาณ
- เปิดฝา = หมดประกัน ("Opening the shell will void the warranty") — ตั้งค่าผ่านแอป Fardriver (บท 8) ไม่ต้องเปิดกล่อง
จับคู่กับมอเตอร์ (หัวข้อ 8) มอเตอร์ 15 kW ต่อเนื่องดึงกระแสฝั่งแบต ~195 A — คอนโทรลเลอร์ตัวนี้รับ Line ได้ถึง 330 A จึงมีเฮดรูมเหลือสำหรับช่วงเร่งพีค
แบบฝึกหัด — ต่อและทดสอบระบบมอเตอร์
เน้นความปลอดภัยและลำดับขั้นตอน
ข้อ 1 เลือกขนาดเบรกเกอร์
ระบบดึงกระแสต่อเนื่อง 80A ควรเลือกเบรกเกอร์ขนาดประมาณเท่าไร? (แสดงวิธีคิดจากตัวคูณ 1.25–1.5×)
ข้อ 2 วัดแรงดันคันเร่ง
เปิดกุญแจ วัดแรงดันสายสัญญาณคันเร่งที่ตำแหน่งต่าง ๆ (ค่าจริงขึ้นกับคันเร่ง)
| ตำแหน่งคันเร่ง | ปล่อยสุด | ครึ่ง | เต็มสุด |
|---|---|---|---|
| แรงดันสัญญาณ (V) |
ข้อ 3 เช็กลิสต์เปิดเครื่องอย่างปลอดภัย (เรียงลำดับ)
เขียนหมายเลข 1–5 ให้ถูกลำดับก่อน-หลัง
- ยกเรือพ้นน้ำ / ถอดใบพัด (กรณีทดสอบบนบก)
- ตรวจขั้ว +/− และความแน่นของทุกจุดต่อ
- สับเบรกเกอร์/เปิดสวิตช์หลัก (ผ่าน precharge)
- เปิดกุญแจ แล้วเร่งคันเร่งเบา ๆ สังเกตมอเตอร์
- ตรวจว่าเบรกเกอร์ปิดอยู่ก่อนต่อสายทั้งหมด
ข้อ 4 วิเคราะห์ปัญหา
มอเตอร์กระตุก/ไม่ออกตัว สาเหตุที่เป็นไปได้มีอะไรบ้าง? (เฟส / hall / คันเร่ง)